
Robotics & Electronics
Portfolio
ROS & Gazebo Rover Simulation with arduino firmware integration
ROS 2 + Gazebo Rover Simulation
Built a differential-drive rover simulated in Gazebo using ROS 2 (Humble), featuring real-time velocity control, topic-based command switching, and modular launch files. Integrated perception-ready camera streams and validated control logic in simulation before hardware deployment.
Arduino Joystick Firmware
Developed custom Arduino firmware to read joystick inputs, apply deadzones and scaling, and stream commands over serial to ROS. The firmware enables seamless manual-to-autonomous control handoff and mirrors real rover control behavior for testing and demos.
APSC 103 - Canadian Space Agency Rover Traction System
-Worked among peers with the CSA to design a lunar rover traction system prototype.
-Communicated with the client to achieve the desired result.
-Manufactured physical prototypes using SolidWorks to test mathematical models.
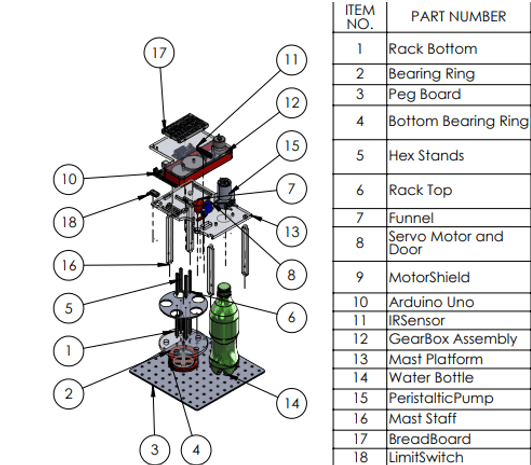
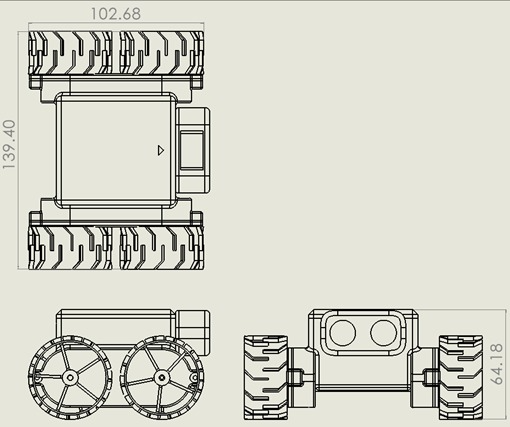
APSC 101 - Automated Fluid Dispensing Turntable
-Acted as team lead to design and develop an automated fluid dispensing turntable.
-Applied 3D modelling skills and developed equations to model parts for each subfunction.
